|
| Trust me, I'm a jet engine |
Movement
Wheels
Propeller
Jet Engine
Weapons
Saw
Flame Thrower
Locket Launcher
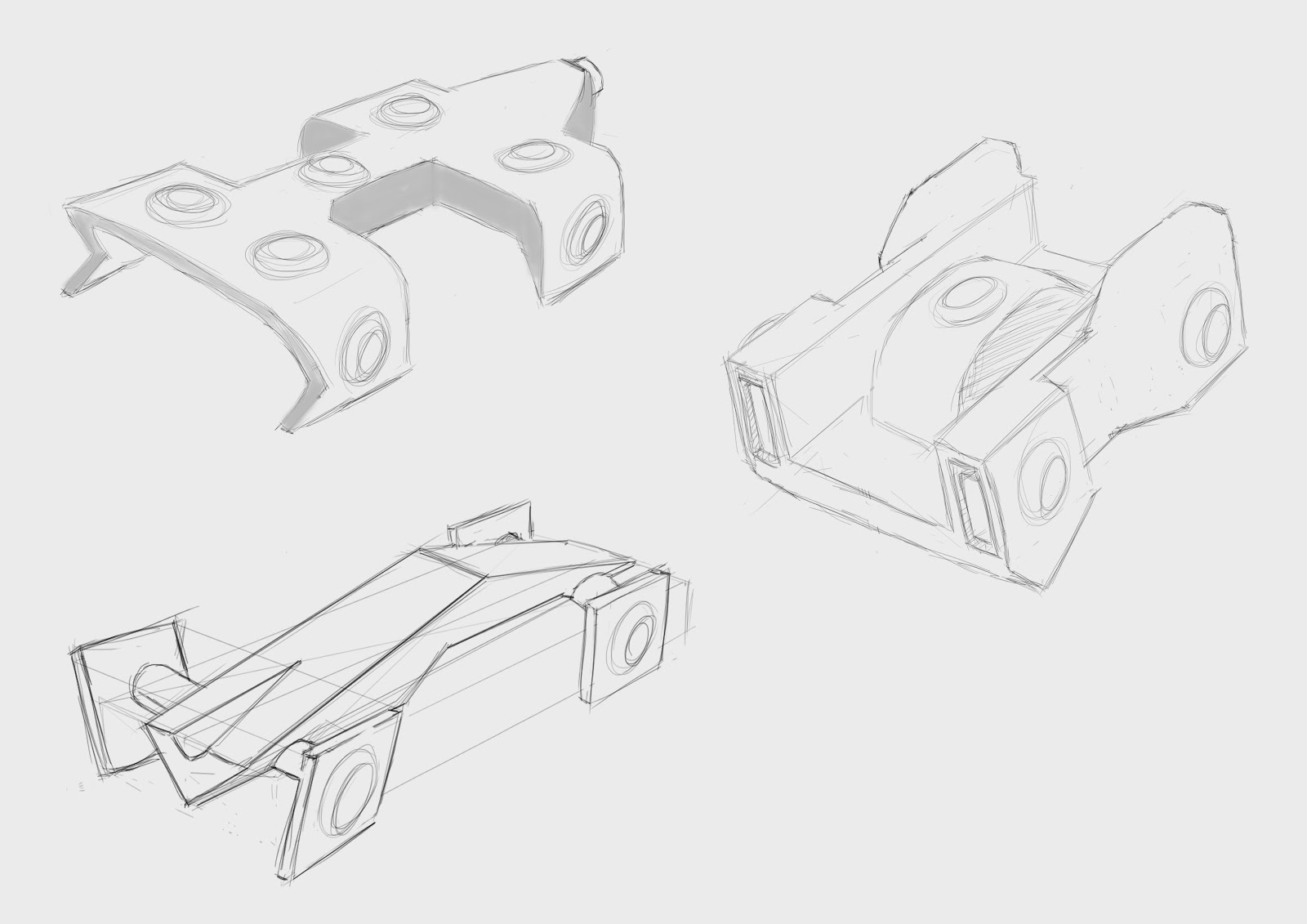
Plus various arm and base parts. Our workflow: Parts are sketched out first, then 3D-modelled and textured. After that, programming their functionalities in Unity starts, particles and sound effects will be added later on.
I have started to realize how useful a good sketch and idea of how something will look like is when making a 3D model. Thank you, Sabi!
We're keeping an overview on our progress in a Google Spreadsheet including all steps for each part.